
I am Ameya Salvi, currently working as a Robotics Researcher at Hitachi America, Ltd. after wrapping my PhD in the Department of Automotive Engineering at Clemson University. My research specialization lie in mobile robotics, with an emphasis on planning and control in uncertain and unstructured environments. I like to focus on full stack robotics, with personal interests in modeling and control of dynamical systems.
Research Interests
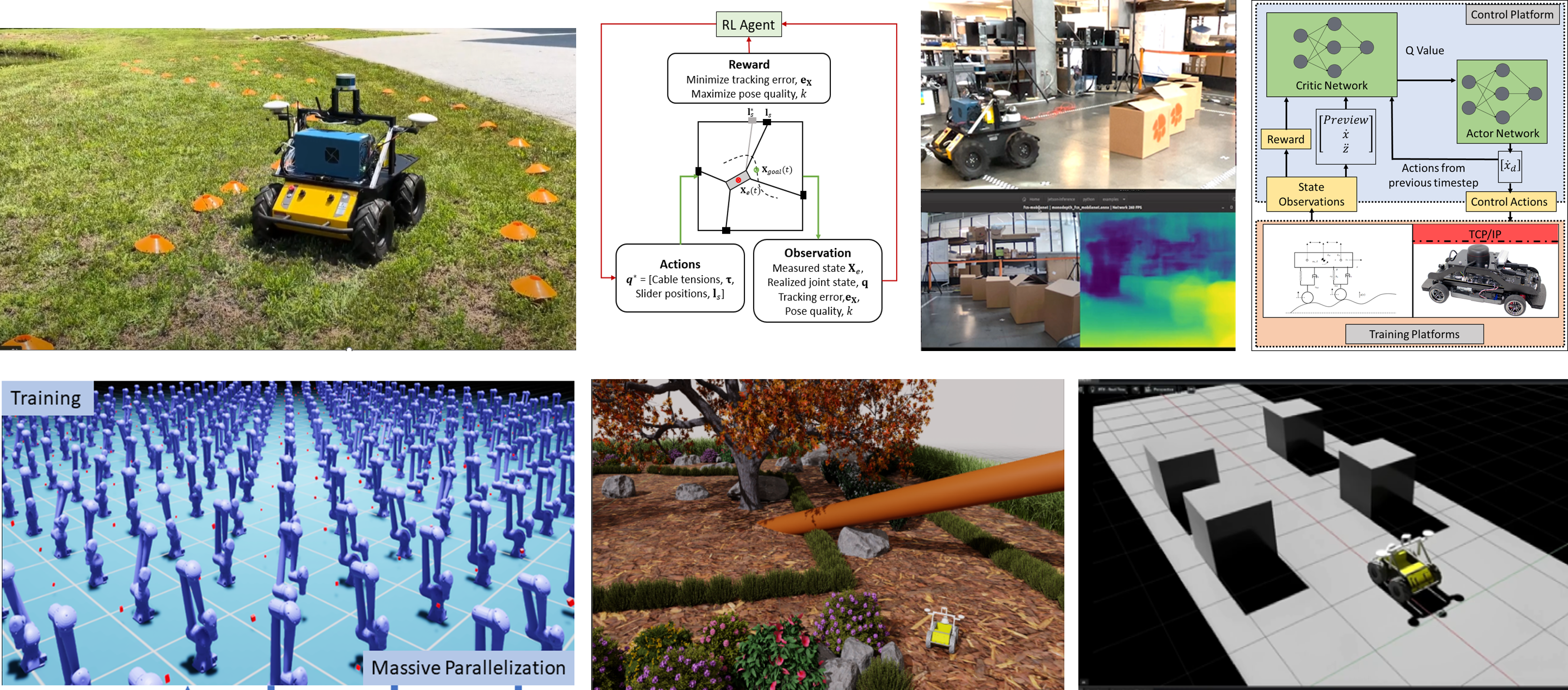
My current research experience spans the development of learning-based controllers for motion planning and control of a wide range of robot platforms and applications, including skid-steered wheeled mobile robots, Ackermann-steered car-like robots, cable-driven parallel robots, and robotic arms. My work emphasizes leveraging the underlying geometric robot motion models to structure and accelerate control policy learning. In addition to physical deployments, my experience also includes utilizing containerized high-power compute cluster based simulated environments to enable rapid robot learning.
Profession Highlights
 | 2020 - 2025 : PhD at Clemson University | |
| Research Assistant - VIPR-GS | ||
| Teaching Assistant - Autonomy Science and System | ||
| Disseration - Learning for Skid-steer wheel mobile robots | ||
| 2018 - 2020 : MS at Clemson University | |
| Course Focus : Dynamical Systems and Controls | ||
| Summer Internship : Proterra | ||
 | 2013 - 2017 : BE at Mumbai University | |
| Formula Student Competitions | ||
| ASME Human Powered Vehicle Challenge | ||
| Course Focus : Mechanical Engineering |